介绍
CylindricalRollerBearing用于圆柱滚子轴承的计算和建模。
原理
$C_0$
The basic static radial load rating for radial roller bearings is given by the equation:
$$
C_0=44(1-\frac{D_{we}cos\alpha}{D_{pw}})iZL_{we}D_{we}cos\alpha
$$
$C_r$
The basic static radial load rating for radial roller bearings is given by the equation:
$$
C_r=b_mf_c(iL_{we}cos\alpha)^{7/9}Z^{3/4}D_{we}^{29/27}
$$
类结构
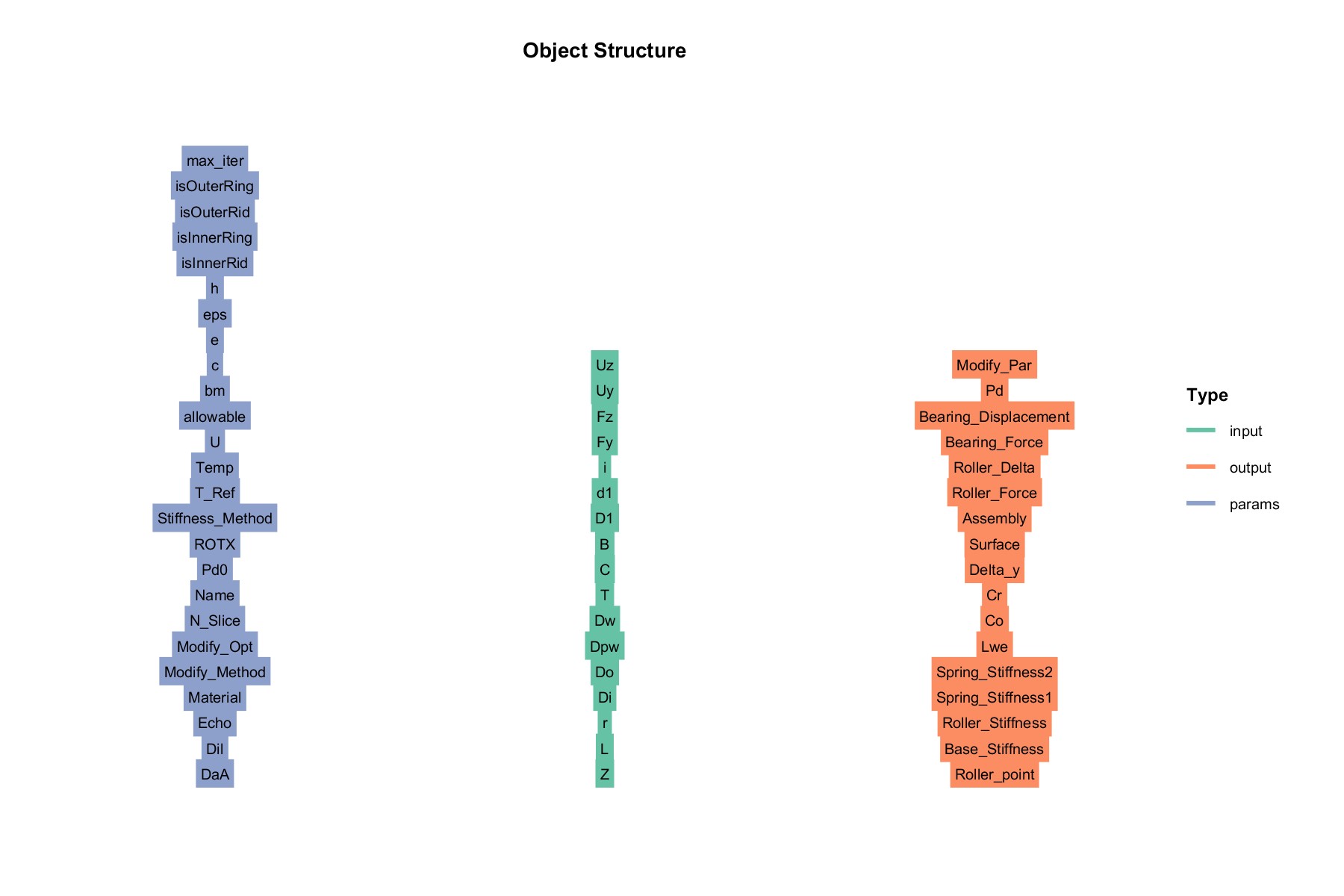
输入 input:
- Z: 滚子数量 [mm]
- L : 滚子长度 [mm]
- r : 滚子倒角 [mm]
- Di : 轴承内径 [mm]
- Do : 轴承外径 [mm]
- Dpw : 轴承分度圆直径 [mm]
- Dw : 轴承滚子直径 [mm]
- T : 轴承宽度 [mm]
- C : 外圈宽度 [mm]
- B : 内圈宽度 [mm]
- D1 : 外圈挡边直径 [mm]
- d1 : 内圈挡边直径 [mm]
- i : 滚子列数
- Fy : 轴承y方向力 [N]
- Fz : 轴承z方向力 [N]
- Uy : 轴承y方向变形 [mm]
- Uz : 轴承z方向变形 [mm]
参数 params:
- Material : 材料属性,默认为铁
- N_Slice : 切片数量
- Name : 名称
- Modify_Method : 滚子修形方法
- Modify_Opt : 滚子修形参数
- ROTX : 变换矩阵
- allowable : 最大许用接触应力 [Mpa]
- e : 威布尔斜率
- c : 常数c
- h : 常数h
- bm : ISO bm系数
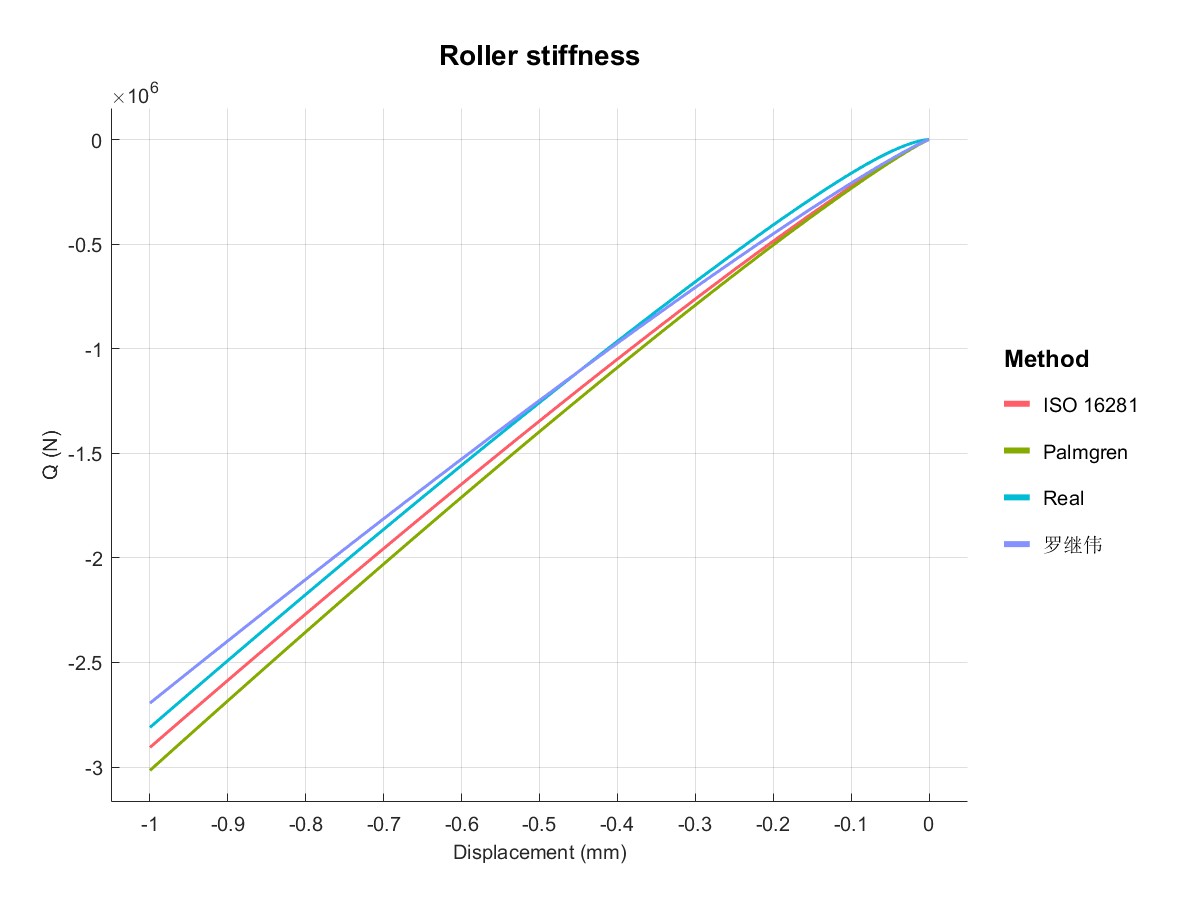
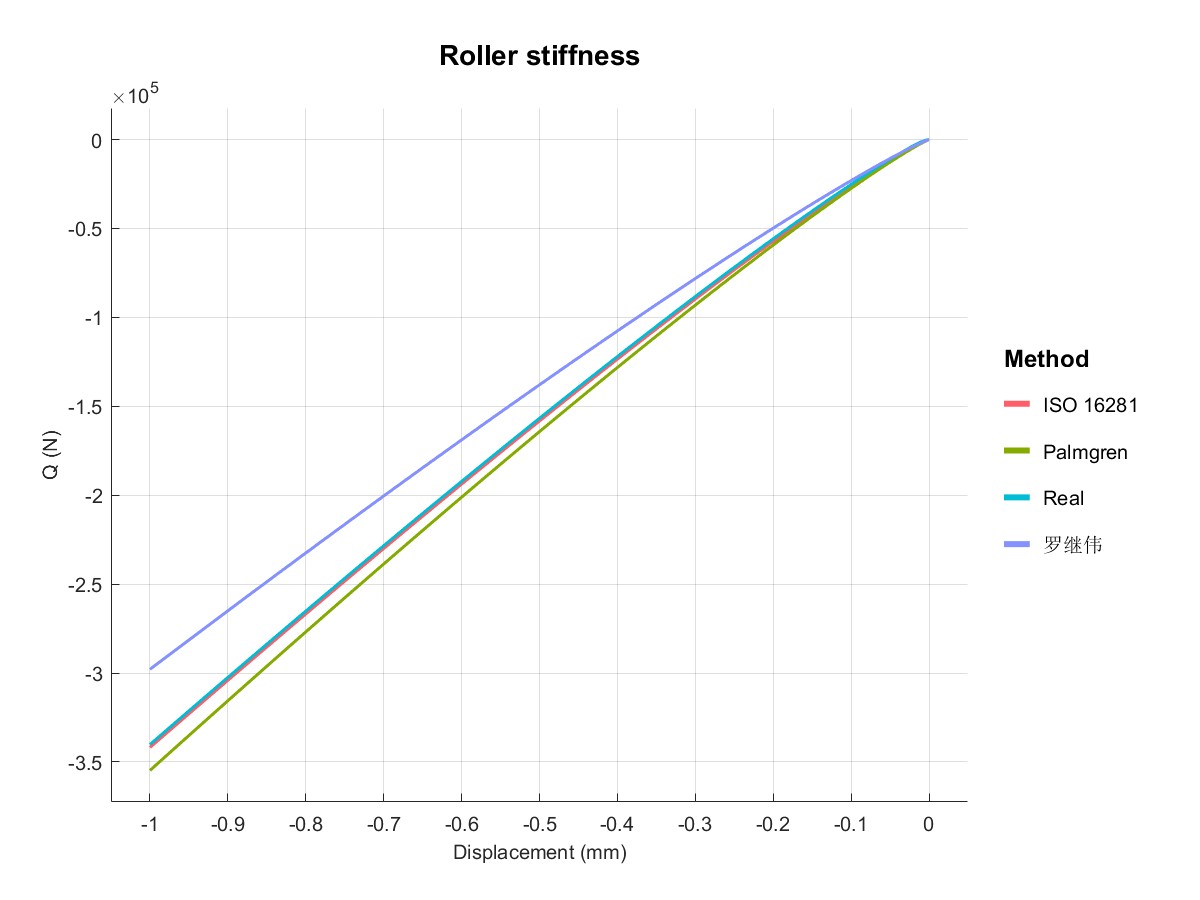
- Stiffness_Method : 滚子刚度计算方法 0: ISO 16281 1: Palmgren 2: 罗继伟
- isInnerRing : 内圈是否存在
- isOuterRing : 外圈是否存在
- isInnerRid : 内圈挡边是否存在
- isOuterRid : 外圈挡边是否存在
- Pd0 : 轴承配合 [mm] +表示预紧 -表示游隙
- T_Ref : 参考温度
- Temp : 轴承温差
- U : 内外圈配合
- Dil : 轴内径 [mm]
- DaA : 轴承座外径 [mm]
- eps : 定义残差限值
- max_iter : 最大迭代次数
输出 output :
- Roller_point : 滚子节点
- Base_Stiffness
- Roller_Stiffness : 滚子刚度
- Spring_Stiffness1 : 滚子弹簧刚度 [N/mm]
- Spring_Stiffness2 : 滚子弹簧刚度 [N/mm] to ANSYS
- Lwe : 滚子有效计算长度 [mm]
- Co : 计算C0 [N]
- Cr : 计算Cr [N]
- Delta_y : 轮廓修形量 [mm]
- Surface : 轴承截面
- Assembly : 装配体
- Roller_Force : 轴承滚子反力 [N]
- Roller_Delta : 轴承滚子位移 [mm]
- Bearing_Force : 轴承反力 [N]
- Bearing_Displacement : 轴承位移 [mm]
- Pd :轴承游隙 [mm]
- Modify_Par : 滚子修形参数
案例
Roller stress calculation (Flag=1)
inputStruct.Z=50;
inputStruct.L=144; % 滚子长度 [mm]
inputStruct.r=2; % 滚子倒角 [mm]
inputStruct.Di=995; % 轴承内径 [mm]
inputStruct.T=190;
inputStruct.C=190;
inputStruct.B=190;
inputStruct.Do=1250;% 轴承外径 [mm]
inputStruct.D1=1158;
inputStruct.d1=1074.5;
inputStruct.Modify_Method=0;
inputStruct.Dpw=1118;% 轴承分度圆直径 [mm]
inputStruct.Dw=70;% 轴承滚子直径 [mm]
inputStruct.Uz=-0.3;% 轴承位移
% inputStruct.Fz=-4e6;% 轴承力
inputStruct.i=1;% 轴承列数
paramsStruct.Name='Roller_Bearing';
% paramsStruct.Pd0=0.644;
% paramsStruct.Pd0=-0.6;
% paramsStruct.Temp=[75,70];
paramsStruct.Dil=720;
paramsStruct.DaA=1735;
% paramsStruct.U=[0.36,0.106];
paramsStruct.isOuterRid=[0,1];
paramsStruct.isInnerRid=[1,1];
Roller_Bearing=bearing.CylindricalRollerBearing(paramsStruct, inputStruct);
Roller_Bearing = Roller_Bearing.solve();
Plot_Roller_Force(Roller_Bearing);
Plot_Roller_Stiffness(Roller_Bearing);
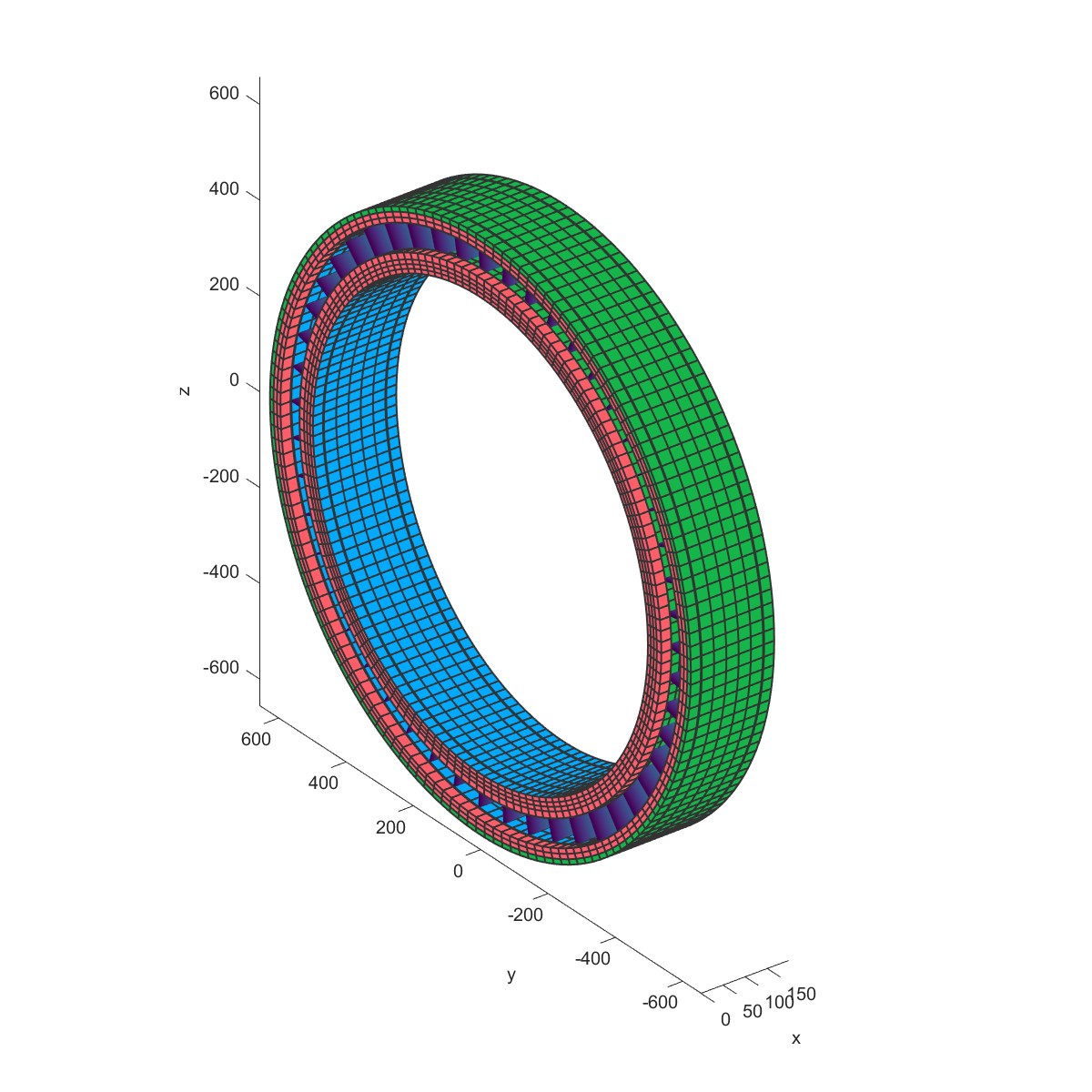
Plot2D(Roller_Bearing);
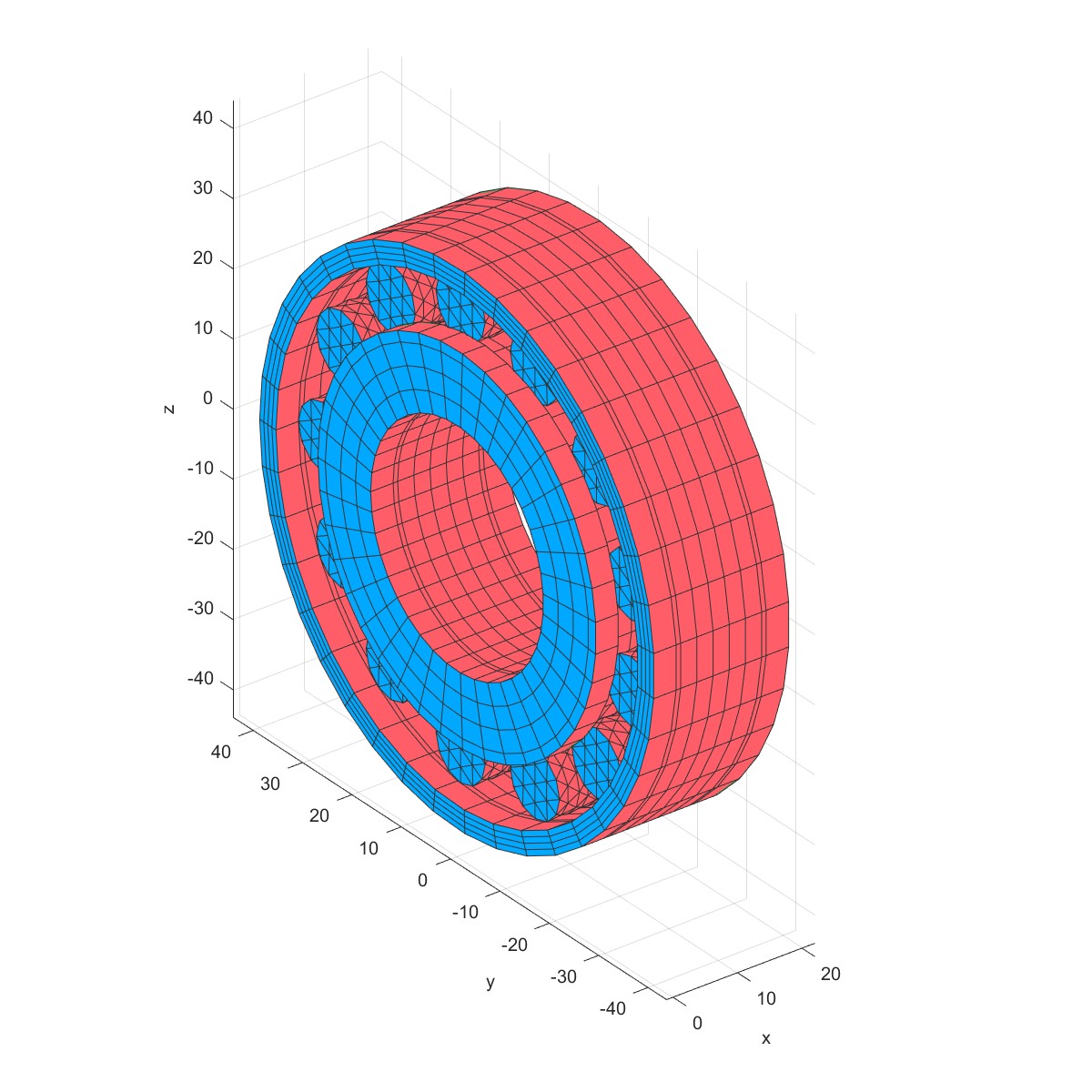
Plot3D(Roller_Bearing);
Plot(Roller_Bearing.output.Assembly)
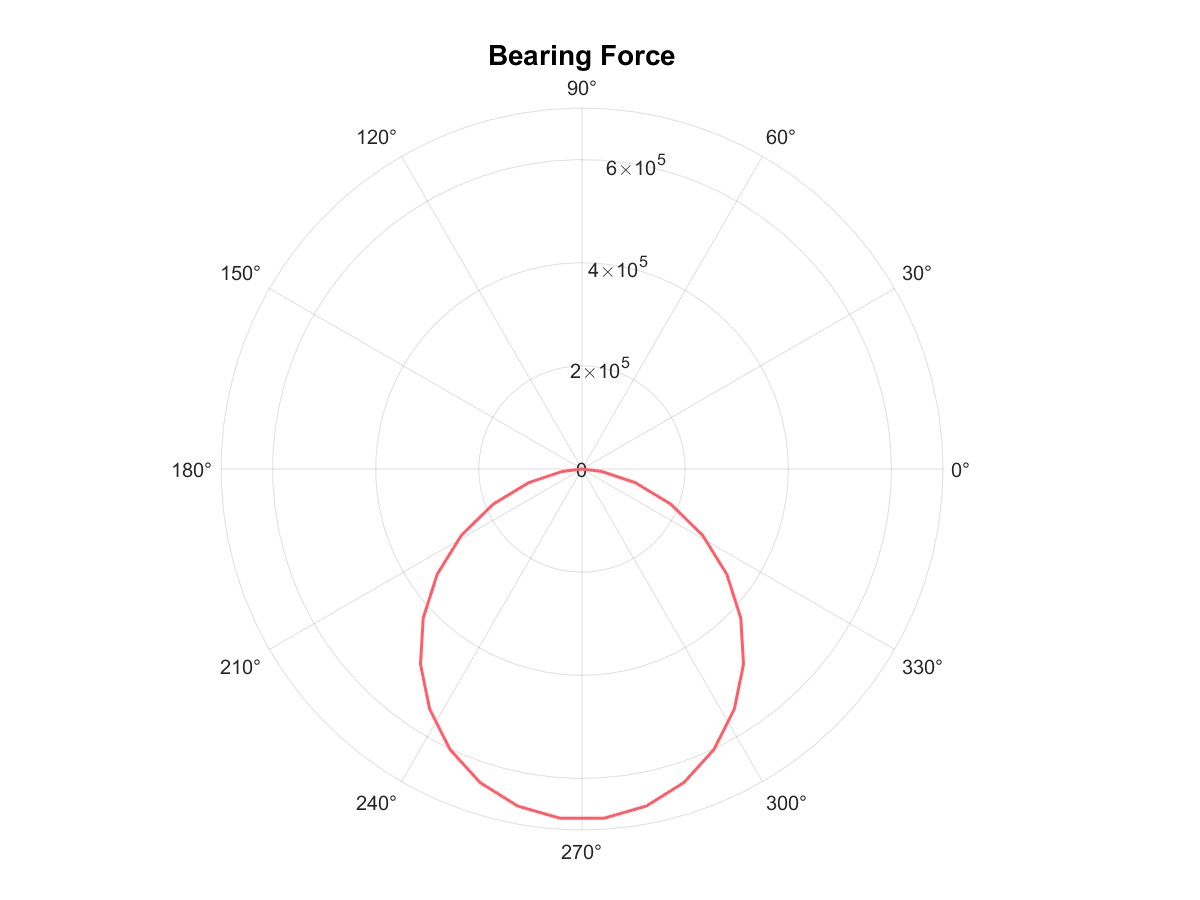 |  |
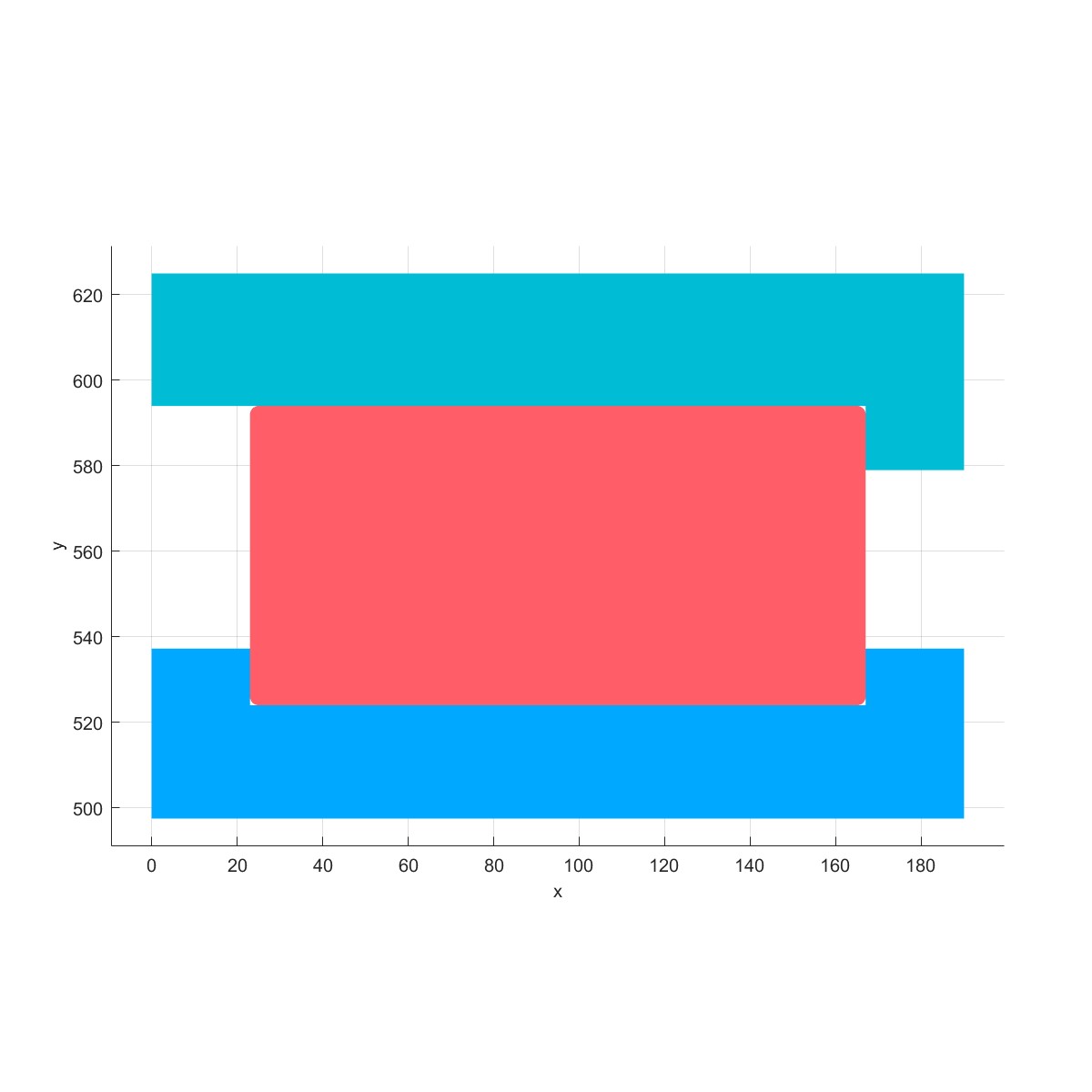 | 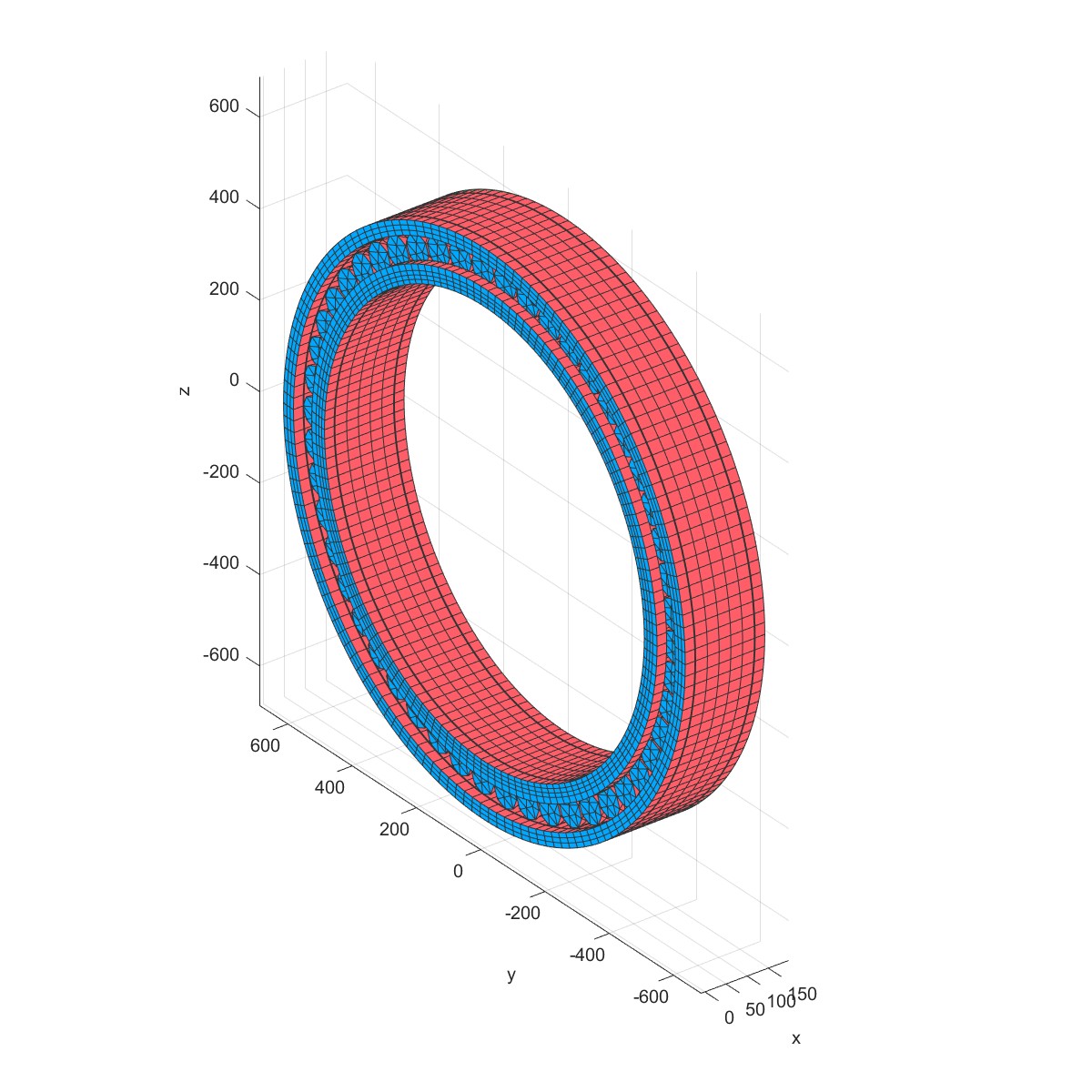 |
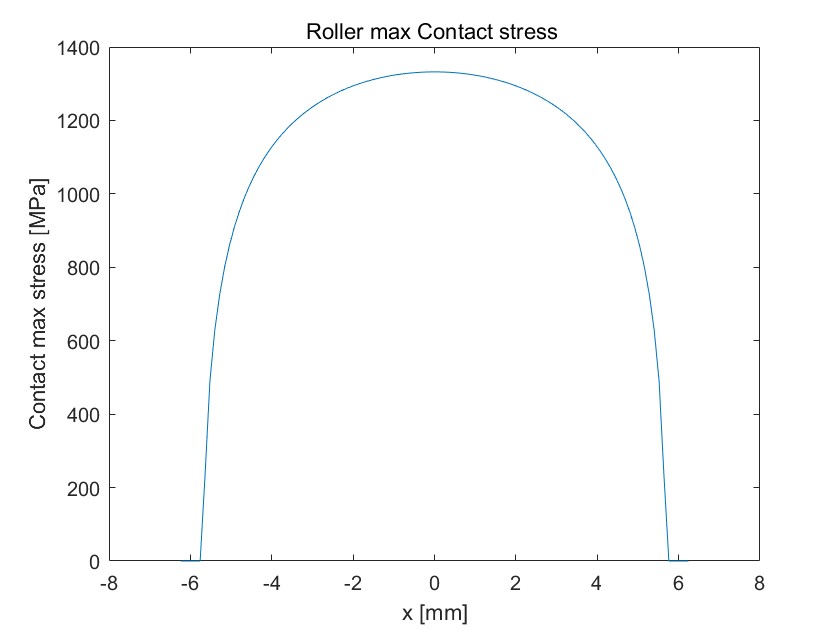
Roller bearing with Non_Hertz_Contact (Flag=2)
inputStruct.Z=13;
inputStruct.L=14; % 滚子长度 [mm]
inputStruct.r=0.7; % 滚子倒角 [mm]
inputStruct.Di=35; % 轴承内径 [mm]
inputStruct.T=21;
inputStruct.C=21;
inputStruct.B=21;
inputStruct.Do=80;% 轴承外径 [mm]
inputStruct.d1=56.4;
inputStruct.Modify_Method=0;
inputStruct.Dpw=63.4;% 轴承分度圆直径 [mm]
inputStruct.Dw=10;% 轴承滚子直径 [mm]
inputStruct.i=1;% 轴承列数
paramsStruct.Name='Roller_Bearing';
paramsStruct.isOuterRid=[0,0];
paramsStruct.isInnerRid=[1,1];
Roller_Bearing=bearing.CylindricalRollerBearing(paramsStruct, inputStruct);
Roller_Bearing = Roller_Bearing.solve();
Plot_Roller_Stiffness(Roller_Bearing);
Plot2D(Roller_Bearing);
Plot3D(Roller_Bearing);
Plot(Roller_Bearing.output.Assembly)
input1Struct.Q=1840;
input1Struct.x=Roller_Bearing.output.Roller_point.x1;
input1Struct.y=Roller_Bearing.output.Delta_y;
input1Struct.Lwe=Roller_Bearing.output.Lwe ;
input1Struct.D1=10;
input1Struct.D2=inputStruct.Dpw-inputStruct.Dw;
params1Struct=struct();
Roller_Stress=method.Non_Hertz_Contact.Roller_Calculation(params1Struct,input1Struct);
Roller_Stress=Roller_Stress.solve();
PlotProfile(Roller_Stress)
Plota(Roller_Stress)
PlotP(Roller_Stress)
 | 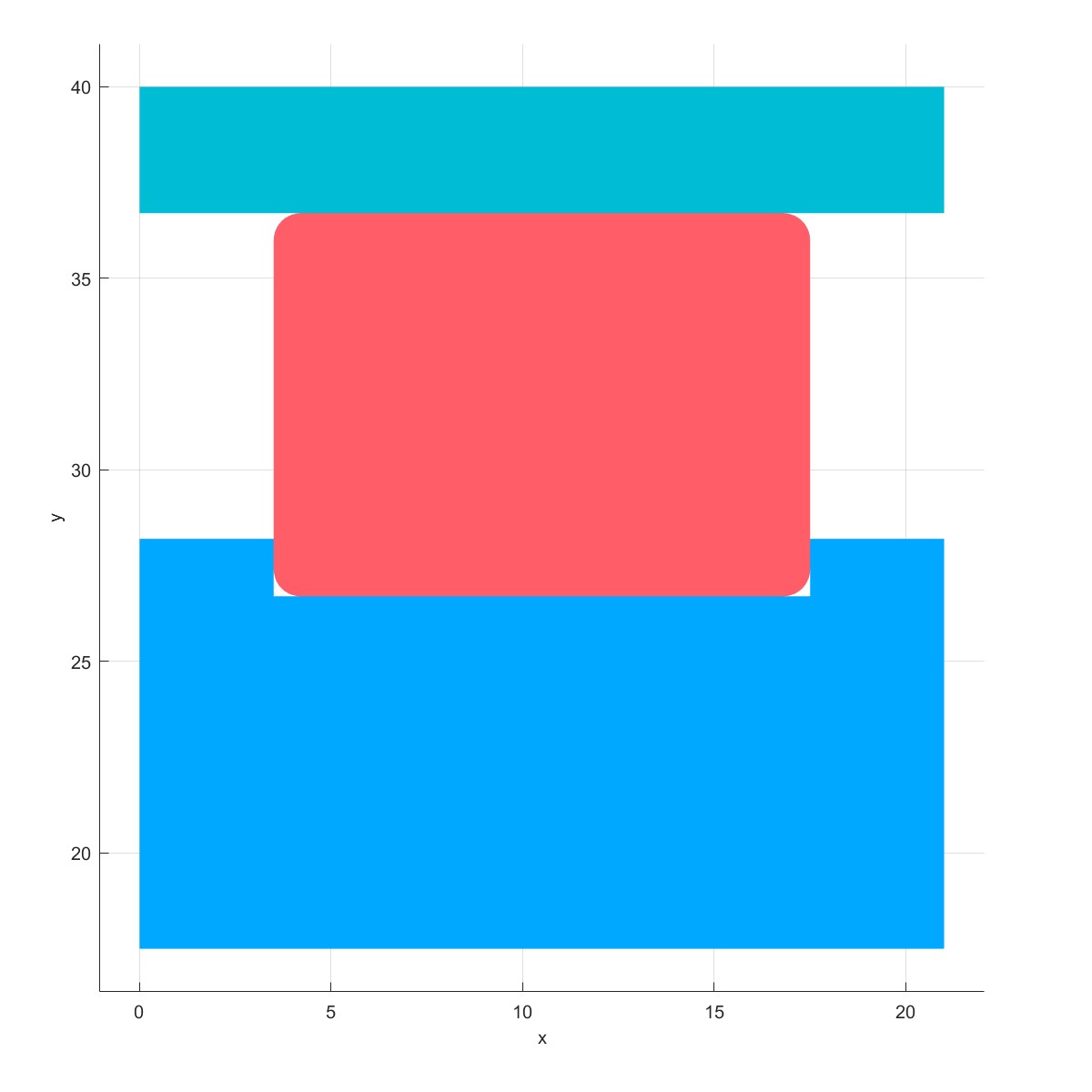 |
 | 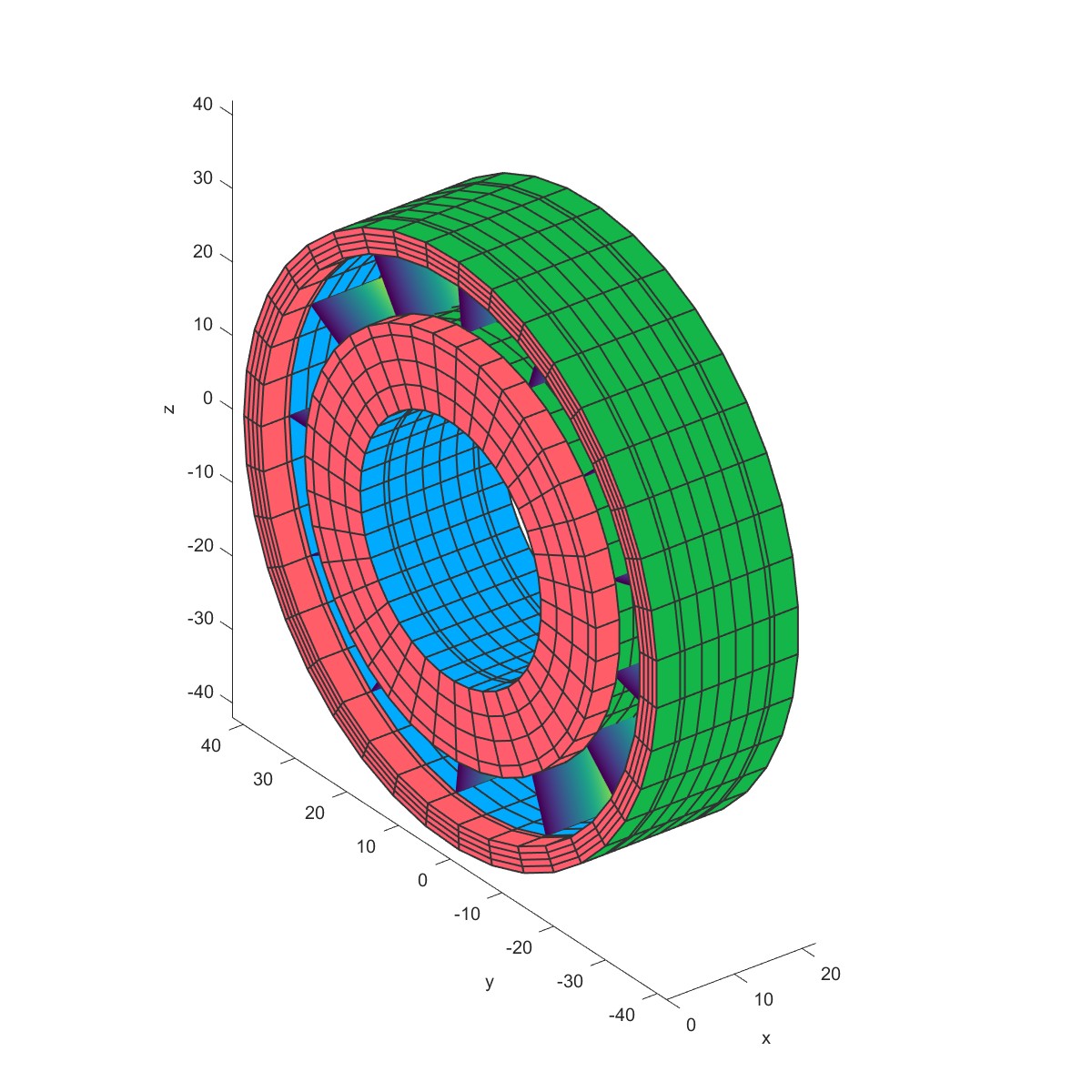 |
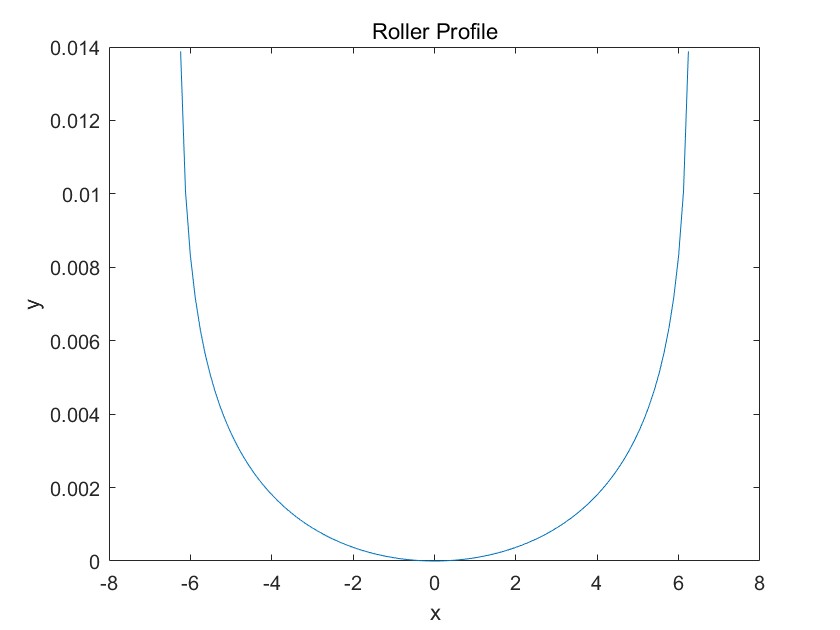 | 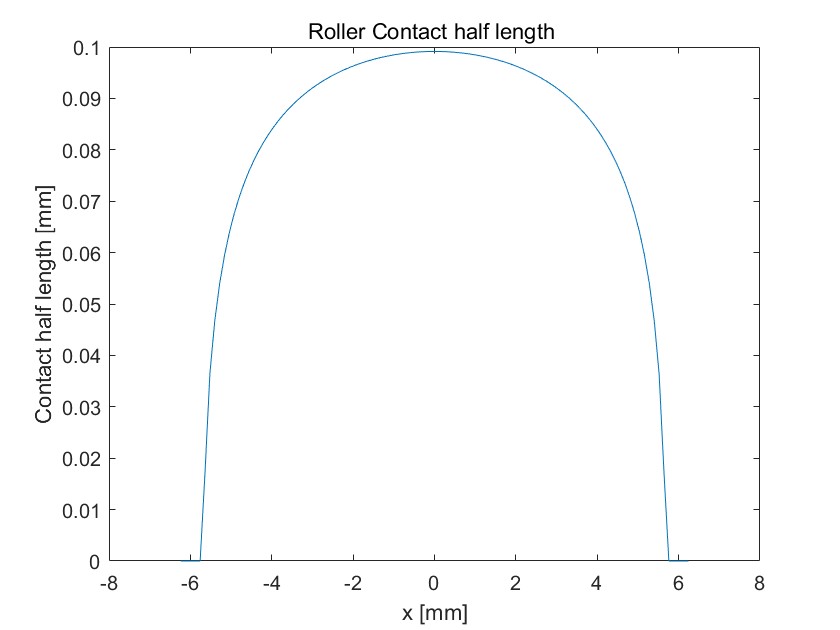 |
参考文献
[1] ISO 76
[2] ISO 281
本网站基于Hexo 3-Hexz主题生成。如需转载请标注来源,如有错误请批评指正,欢迎邮件至 392176462@qq.com